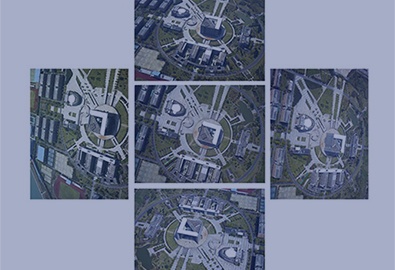
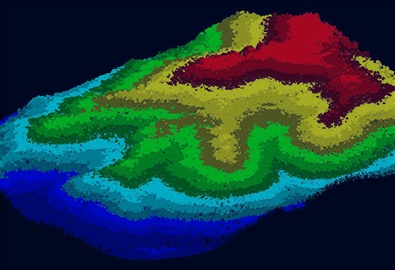
基于航天、航空立體影像和其他相關資料,進行區域網平差,構建立體模型,匹配生成 DSM,經數據編輯、裁切與接邊、元數據制作和質量檢查,生成 DEM、DSM。
a.資料收集。收集生產區域航天、航空立體影像,以及滿足精度要求的控制資料。
b.區域網平差。依據任務區域地理特征及影像情況,將任務區合理劃分為若干分區,在各個區域網內量測一定數量的連接點和像控點,選取相適宜的區域網平差數學模型和策略進行區域網平差計算,并對不同區域網之間的成果接邊。
c.立體模型恢復。基于區域網平差成果恢復立體模型,對立體模型進行相對和絕對精度檢核。
d.立體匹配。利用相關函數、協方差函數、差平方和等方法識別兩幅影像之間的同名特征點,完成立體影像匹配。
e.DEM、DSM 生成。基于影像匹配獲取的同名點數據,經后方交會和移動曲面擬合處理獲得 DSM,在此基礎上,對非地面高程區域進行人工編輯,將地表高程降至地面高程,裁切生成 DEM,經與已有成果數據接邊處理和元數據制作,完成大地高到正常高轉換,形成正常高 DEM、DSM 數據成果。

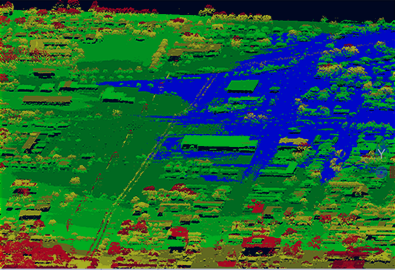
基于 LiDAR 數據,經過軌跡解算、點云解算、噪聲去除、航帶間匹配、點云濾波、精細編輯、構 TIN、裁切與接邊、元數據制作和質量檢查等工序,生成 DEM、DSM。
a.資料收集。獲取生產區域 LiDAR 點云數據。b.軌跡解算。通過原始實時 GNSS/IMU 軌跡數據、衛星導航定位連續運行基準站(CORS 站)數據進行聯合解算,得到精確的軌跡信息。
c.點云解算。結合精確的軌跡信息,獲得 LAS 格式的點云數據。
d.噪聲去除。對點云數據進行粗差剔除等操作,剔除錯誤點和高程異常點。
e.航帶間匹配。對點云相鄰航帶進行匹配,減少航帶間系統誤差。
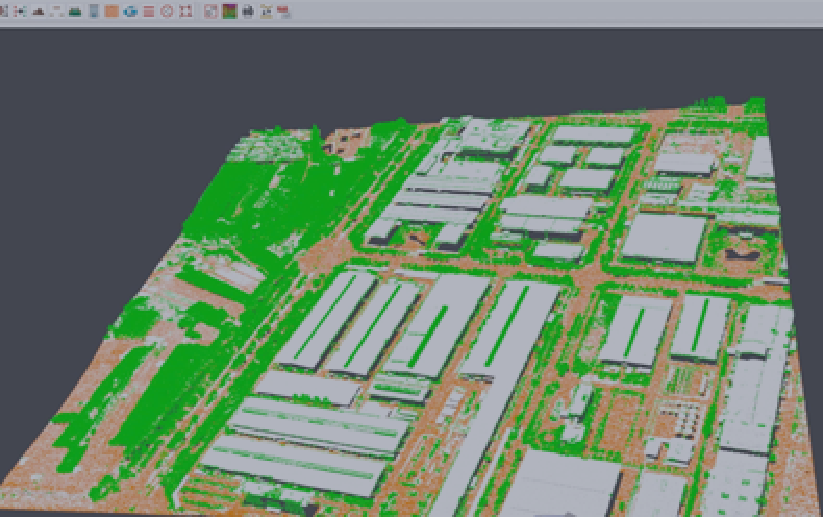
f.點云濾波。基于發射強度、回波次數、地面形狀等算法或算法組合對點云數據進行過濾,將建筑物、電力設施等地物分類成非地面點,實現對地表數據的分類提取,分離非地面點。
g.精細編輯。利用點云分類軟件對自動分類后的數據進行檢查,對分類錯誤數據進行修正。
h.構 TIN,內插生成 DEM。對人工濾波后的點云數據,構成不規則三角網,設置構網間距,內插輸出 DEM、DSM。
i.DEM、DSM 生成。裁切生成 DEM、DSM,完成與已有成果數據接邊處理和元數據制作,開展大地高到正常高的轉換,形成正常高DEM、DSM 成果。
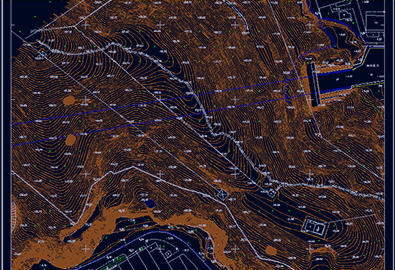
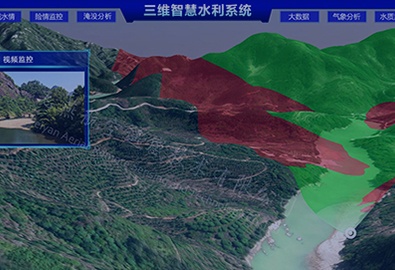
近岸海域 10 米以淺 DEM 生產包括海岸線至 0 米等深線 2 米格網間距 DEM 和 0 米等深線至 10 米等深線 10 米格網間距 DEM。其 中,海岸線至 0 米等深線 DEM 生產數據源為船載測深水下地形測量成果和 LiDAR 灘涂測量成果。
0 米等深線至 10 米等深線 DEM 生產數據源為船載測深 1∶ 10000 水下地形測量成果。
a.LiDAR 點云數據生產 DEM。利用經過分類后的地面點云作為地形特征點進行構建 TIN 模型;按照規定的格網間距采樣,內插生成格網 DEM;為保證地形連續和 DEM 數據完整,需已有點云基礎上適當添加坡、坎等特征線參與 DEM 的生成。
b.船載實測水深數據生產 DEM。利用實測水深點作為地形特征點構建 TIN 模型;按照 2 米×2 米或 10 米×10 米網格間距采樣分別內插生成海岸線至 0 米等深線、0 米等深線至 10 米等深線范圍的 DEM。
c.數據接邊、融合及成果。不同數據接邊時,通過查看剖面圖,檢查相鄰 DEM 模型重疊帶內同名格網點的高程差異,若高程較差大于 2 倍 DEM 高程中誤差,則視為超限,分別返回各 DEM 模型,對超限處進行接邊修正;LiDAR 點云 DEM 和船載測深 DEM 鑲嵌接邊時,交叉點格網高程值融合方法可選取平均值,使地形平滑過渡;存儲 DEM 數據時,應確定定位參考點的柵格坐標及其高斯投影平面坐標,以及格網間距、行數、列數等信息。
近岸海域 10 米以淺 DBM 制作范圍為 0 米等深線至 10 米等深線生產,網格間距 10 米,比例尺為 1∶10000,深度基準為當地理論最低潮面。DBM 生產數據源主要為船載測深 1∶10000 水下地形測量成果。
a.數據選點。以測區 0 米和 10 米等深線數據為邊界適當外擴,應滿足《基礎地理信息數字成果 數字水深模型》(CH/Z 9026-2018)1∶10000 DBM 成果外擴 100 米要求,邊界如遇海岸線則外擴至海岸線,選取該范圍內水深高程點數據作為 DBM 模型生產的基礎數據。
b.模型構建。根據地形變化的特點,選用采用最小曲率法、改進的謝別德法、帶線性插值的三角網法以及克里金插值法等能夠真實反映地形變化趨勢的內插方法,利用選取的水深點進行內插建模,未納入水深模型構建的特征點作為單獨的文件保存,DBM 格網大小應符合《基礎地理信息數字成果 數字水深模型》(CH/Z9026-2018)的規定。
c.DBM 生產。DBM 模型構建后對無法獲取水深數據的區域網格水深值賦予-99999,海上非透水構筑物、海島等均可作為空白區域處理。根據《基礎地理信息數字成果 數字水深模型》(CH/Z 9026- 2018)對 DBM 數據按外擴 100 米為邊界,做裁外處理,形成成果DBM 存儲格式應符合《基礎地理信息數字成果 數字水深模型》(CH/Z 9026-2018)的規定。
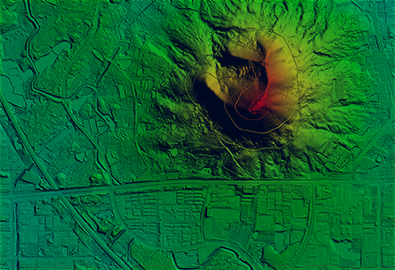
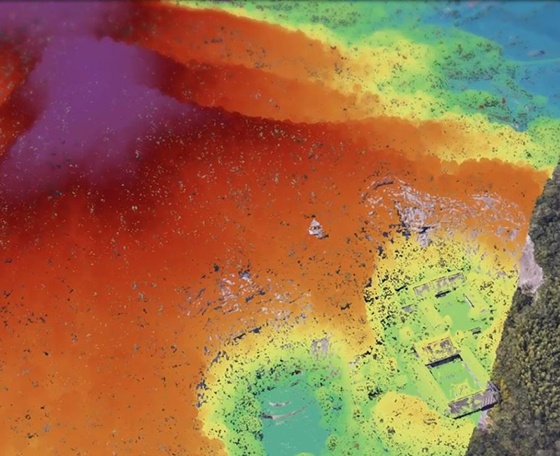
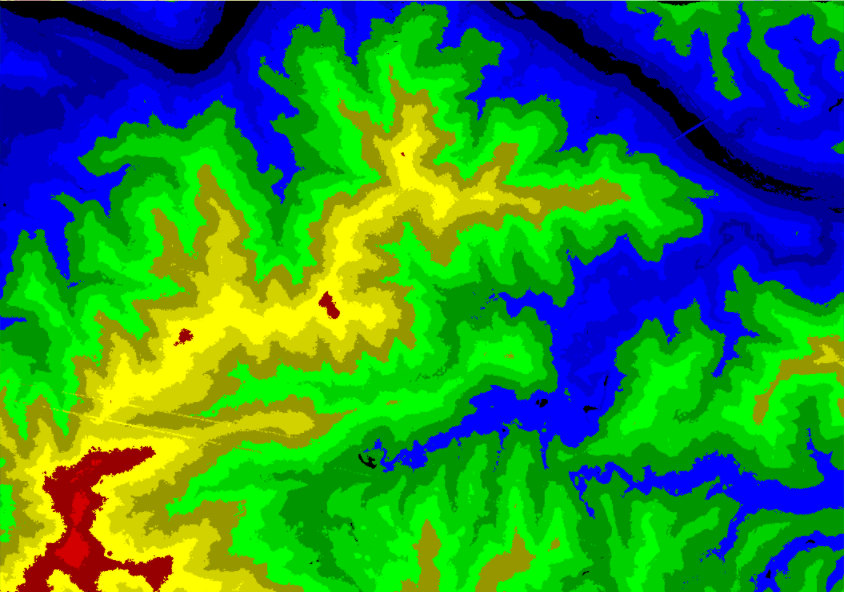
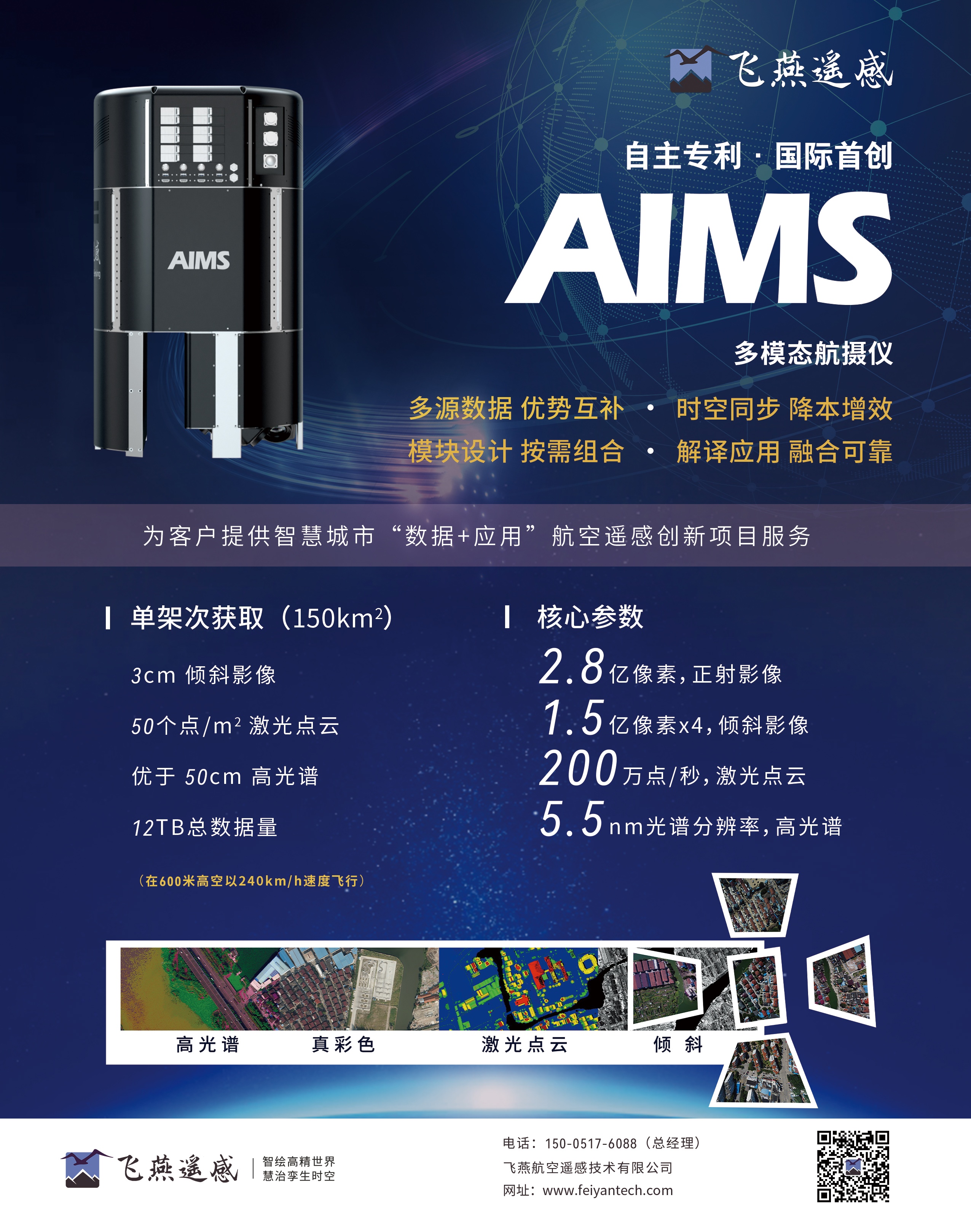
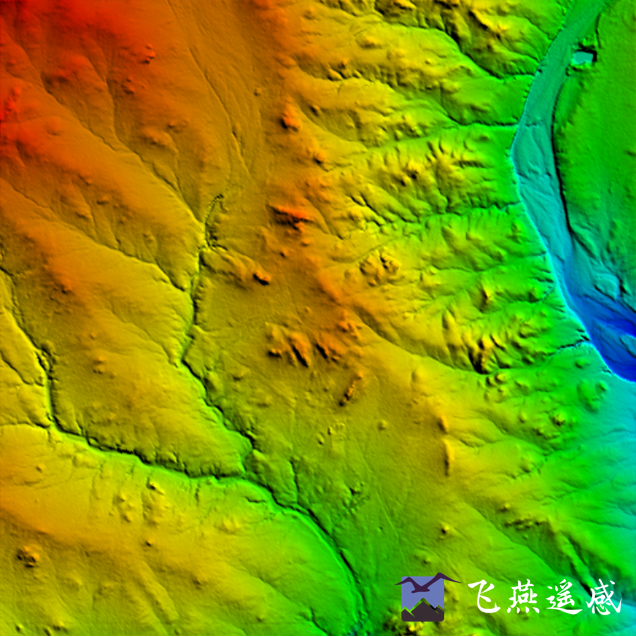
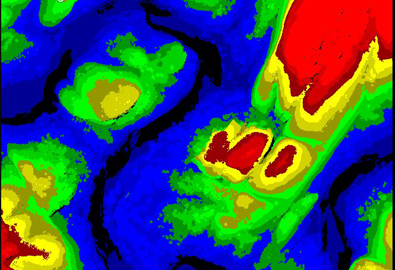
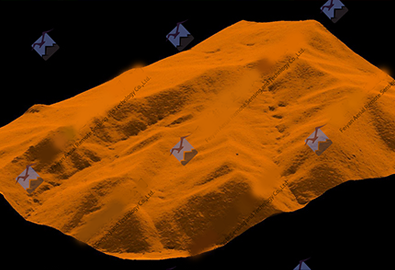
近日,由飛燕航空遙感技術有限公司(以下簡稱“飛燕遙感”)承接的上饒市平地與丘陵地區2米格網數據(DEM、DSM)制作項目順利通過專家組驗收。項目采用飛燕遙感自持機載激光雷達設備,...
項目成果為江西智慧城市建設、空間規劃等領域提供了堅實的數據支撐與決策依據,滿足自...
飛燕遙感外業團隊使用越野車并雇傭有經驗的當地人民帶路進出沙漠,在確保每位外業人員...

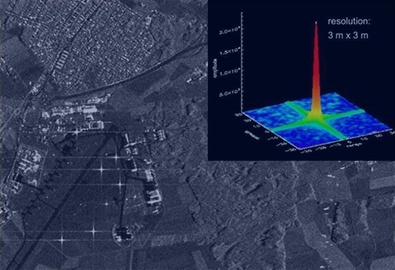
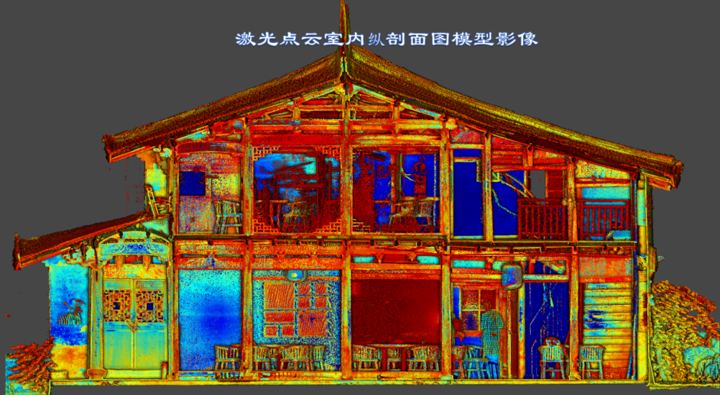
LIDAR全名LightDetectionAndRanging,是一種激光掃描測量技術,它利用GPS和IMU(慣性測量...
目前地形數據獲取主要有三種方式:現場實測、三維正射影像轉數字高程模型DEM、激光三維...
數字高程模型,簡稱DEM(DigitalElevationModel),是表達地面高程起伏形態的實體地面模型...
電話:025-83216189
郵箱:frank.zhao@feiyantech.com HR@feiyantech.com(人力資源)
地址:江蘇省南京市玄武區紅山街道領智路56號星河World產業園3號樓北8樓

微信公眾號

總經理微信
版權所有:飛燕航空遙感技術有限公司 ? 2019-2025 備案號:鄂ICP備19029994號-1 蘇ICP備20022669號-1  鄂公網安備:420106020021194號
鄂公網安備:420106020021194號  簡體中文/English
簡體中文/English